
































产品名称:
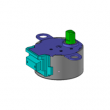
Nidec日电产步进马达MSCA-Ø15mm型号:
MSCA020A55、MSCA020A01、MSCA020A09、MSCA020A45价格:
1最小起订量:
1
产品摘要:
MSCA系列用途:相机、医疗、安防 等。 特性:REACH对应、RoHS对应。
- 产品描述
标准规格
尺寸(mm) Φ15×10.5 重量(g) 10.0 抵抗(Ω) 18 额定电压(V) 5.0 驱动波形 矩形 励磁方式 2相 步进角(°) 18.0 步进精度(%) 10 保持转矩(mN・m) 3.40 掣子转矩(mN・m) 1.000 最大自起動周波数(pps) 1000 给电方式 FPC ○ 丝杠拉线 ○ 针连接器 动作温度环境(℃) -10~70 外观图・转矩特性图
- 其它产品